Recently, a question came up in the SNIA Computational Storage Special Interest Group on new developments in a technology called eBPF and how they might relate to computational storage. To learn more, SNIA on Storage sat down with Eli Tiomkin, SNIA CS SIG Chair with NGD Systems; Matias Bjørling of Western Digital; Jim Harris of Intel; Dave Landsman of Western Digital; and Oscar Pinto of Samsung.
SNIA On Storage (SOS): The eBPF.io
website defines eBPF, extended Berkeley Packet Filter, as a revolutionary
technology that can run sandboxed programs in the Linux kernel without changing
kernel source code or loading kernel modules.
Why is it important?
Dave Landsman (DL): eBPF
emerged in Linux as a way to do network filtering, and enables the Linux kernel
to be programmed. Intelligence and
features can be added to existing layers, and there is no need to add
additional layers of complexity.
SNIA On Storage (SOS): What are the elements of eBPF that would be
key to computational storage?
Jim Harris (JH): The key to eBPF is that it is architecturally
agnostic; that is, applications can download programs into a kernel without
having to modify the kernel. Computational
storage allows a user to do the same types of things – develop programs on a
host and have the controller execute them without having to change the firmware
on the controller.
Using a hardware agnostic
instruction set is preferred to having an application need to download x86 or ARM
code based on what architecture is running.
DL: It is much easier to establish a standard
ecosystem with architecture independence. Instead of an application needing to download
x86 or ARM code based on the architecture, you can use a hardware agnostic
instruction set where the kernel can interpret and then translate the
instructions based on the processor. Computational storage would not need to
know the processor running on an NVMe device with this “agnostic code”.
SOS: How has the use of eBPF evolved?
JH: It is more
efficient to run programs directly in the kernel I/O stack rather than have to
return packet data to the user, operate on it there, and then send the data back
to the kernel. In the Linux kernel, eBPF began as a way to capture and filter
network packets. Over time, eBPF use has
evolved to additional use cases.
SOS:
What are some use case examples?
DL: One of the use cases is performance analysis. For
example, eBPF can be used to measure things such as latency distributions for
file system I/O, details of storage device I/O and TCP retransmits, and blocked
stack traces and memory.
Matias Bjørling (MB): Other examples in the Linux kernel
include tracing and gathering statistics.
However, while the eBPF programs in the kernel are fairly simple, and
can be verified by the Linux kernel VM, computational programs are more
complex, and longer running. Thus, there is a lot of work ongoing to explore
how to efficiently apply eBPF to computational programs.
For example, what is the right set of run-time restrictions
to be defined by the eBPF VM, any new instructions to be defined, how to make
the program run as close to the instruction set of the target hardware.
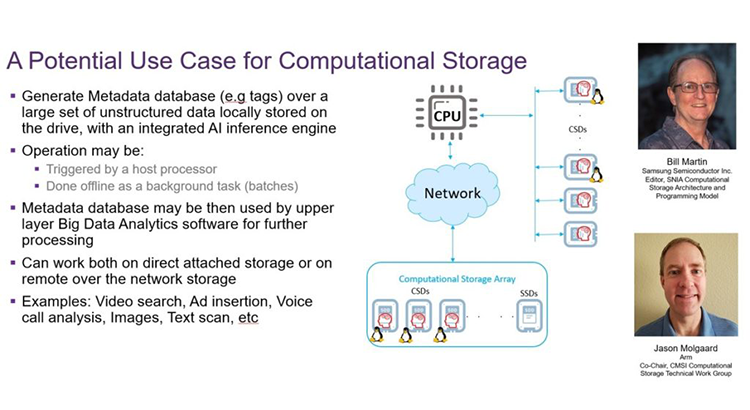
JH: One of the big use cases involves data analytics and
filtering. A common data flow for data analytics are large database table files
that are often compressed and encrypted.
Without computational storage, you read the compressed and encrypted data
blocks to the host, decompress and decrypt the blocks, and maybe do some
filtering operations like a SQL query.
All this, however, consumes a lot of extra host PCIe, host memory, and
cache bandwidth because you are reading the data blocks and doing all these
operations on the host. With computational
storage, inside the device you can tell the SSD to read data and transfer it
not to the host but to some memory buffers within the SSD. The host can then tell the controller to do a
fixed function program like decrypt the data and put in another local location
on the SSD, and then do a user supplied program like eBPF to do some filtering
operations on that local decrypted data.
In the end you would transfer the filtered data to the host. You are doing the compute closer to the
storage, saving memory and bandwidth.
SOS: How does using eBPF
for computational storage look the same? How does it look different?
Jim – There are two parts to this answer. Part 1 is the eBPF instruction set with
registers and how eBPF programs are assembled.
Where we are excited about computational storage and eBPF is that the
instruction set is common. There are already existing tool chains that support
eBPF. You can take a C program and compile it into an
eBPF object file, which is huge. If you
add computational storage aspects to standards like NVMe, where developing a unique
tool chain support can take a lot of work, you can now leverage what is already
there for the eBPF ecosystem.
Part 2 of the answer centers around the Linux kernel’s
restrictions on what an eBPF program is allowed to do when downloaded. For
example, the eBPF instruction set allows for unbounded loops, and toolchains
such as gcc will generate eBPF object code with unbounded loops, but the Linux
kernel will not permit those to execute – and rejects the program. These
restrictions are manageable when doing packet processing in the kernel. The kernel knows a packet’s specific data
structure and can verify that data is not being accessed outside the packet. With computational storage, you may want to
run an eBPF program that operates on a set of data that has a very complex data
structure – perhaps arrays not bounded or multiple levels of indirection. Applying Linux kernel verification rules to
computational storage would limit or even prevent processing this type of data.
SOS: What are some of
the other challenges you are working through with using eBPF for computational
storage?
MB: We know that x86
works fast with high memory bandwidth, while other cores are slower. We have some general compute challenges in
that eBPF needs to be able to hook into today’s hardware like we do for SSDs. What kind of operations make sense to offload
for these workloads? How do we define a
common implementation API for all of them and build an ecosystem on top of it? Do we need an instruction-based compiler, or a
library to compile up to – and if you have it on the NVMe drive side, could you
use it? eBPF in itself is great- but
getting a whole ecosystem and getting all of us to agree on what makes value
will be the challenge in the long term.
Oscar Pinto (OP): The Linux kernel for eBPF today is more
geared towards networking in its functionality but light on storage. That may
be a challenge in building a computational storage framework. We need to think
through how to enhance this given that we download and execute eBPF programs in
the device. As Matias indicated, x86 is great at what it does in the host
today. But if we have to work with smaller CPUs in the device, they may need
help with say dedicated hardware or similar implemented using additional logic
to aid the eBPF programs One question is how would these programs talk to them?
We don’t have a setup for storage like
this today, and there are a variety of storage services that can benefit from
eBPF.
SOS: Is SNIA addressing this challenge?
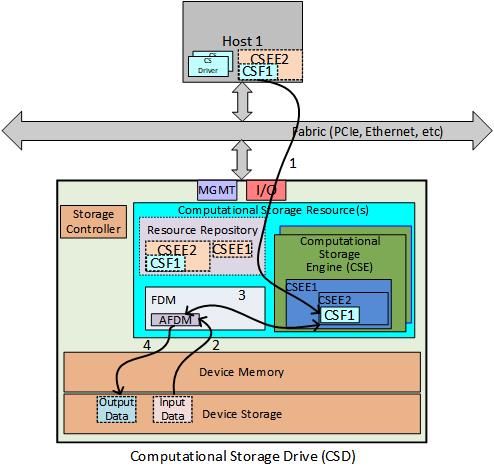
OP: On the SNIA side we are building on program functions
that are downloaded to computational storage engines. These functions run on the engines which are
CPUs or some other form of compute that are tied to a FPGA, DPU, or dedicated
hardware. We are defining these abstracted functionalities in SNIA today, and the
SNIA Computational
Storage Technical Work Group is developing a Computational
Storage Architecture and Programming Model and Computational Storage APIs to address it.. The latest versions, v0.8 and v0.5, has been
approved by the SNIA Technical Council, and is now available for public
review and comment at SNIA Feedback Portal.
SOS: Is there an eBPF standard? Is it aligned
with storage?
JH: We have a
challenge around what an eBPF standard should look like. Today it is defined in the Linux kernel. But if you want to incorporate eBPF in a
storage standard you need to have something specified for that storage
standard. We know the Linux kernel will
continue to evolve adding and modifying instructions. But if you have a NVMe
SSD or other storage device you have to have something set in stone –the
version of eBPF that the standard supports.
We need to know what the eBPF standard will look like and where will it
live. Will standards organizations need
to define something separately?
SOS: What
would you like an eBPF standard to look like from a storage perspective?
JH – We’d like an eBPF standard that can be used by
everyone. We are looking at how
computational storage can be implemented in a way that is safe and secure but
also be able to solve use cases that are different.
MB: Security will be
a key part of an eBPF standard. Programs
should not access data they should not have access to. This will need to be solved within a storage
device. There are some synergies with external key management.
DL: The storage community has to figure out how to work
with eBPF and make this standard something that a storage environment can take
advantage of and rely on.
SOS: Where do you see the future of eBPF?
MB: The vision is
that you can build eBPFs and it works everywhere. When we build new database systems and
integrate eBPFs into them, we then have embedded kernels that can be sent to
any NVMe device over the wire and be executed.
The cool part is that it can be anywhere on the path, so there becomes a
lot of interesting ways to build new architectures on top of this. And together
with the open system ecosystem we can create a body of accelerators in which we
can then fast track the build of these ecosystems. eBPF can put this into overdrive with use
cases outside the kernel.
DL: There may be
some other environments where computational storage is being evaluated, such as
web assembly.
JH: An eBPF run time is much easier to put into an SSD than
a web assembly run time.
MB: eBPF makes more sense – it is simpler to start and
build upon as it is not set in stone for one particular use case.
Eli Tiomkin (ET): Different
SSDs have different levels of constraints.
Every computational storage SSDs in production and even those in
development have very unique capabilities that are dependent on the workload
and application.
SOS: Any
final thoughts?
MB: At this point, technologies are coming together which
are going to change the industry in a way that we can redesign the storage systems
both with computational storage and how we manage security in NVMe devices for
these programs. We have the perfect
storm pulling things together. Exciting platforms can be built using open
standards specifications not previously available.
SOS:
Looking forward to this exciting future. Thanks to you all.